COMMUNICATION チーム
人間の特性について理解し、その知見を活用して高度なインタラクションを実現するシステムのデザインを目指しています。特に、「非言語的情報」に関心を持ち、それらを伝達することで円滑なコミュニケーションを達成するシステムの研究を行っています。
※COMMUNICATIONチームは2020年より活動を開始しました。

研究テーマ例
注視の入出力をインタラクションに用いるスマートスピーカー
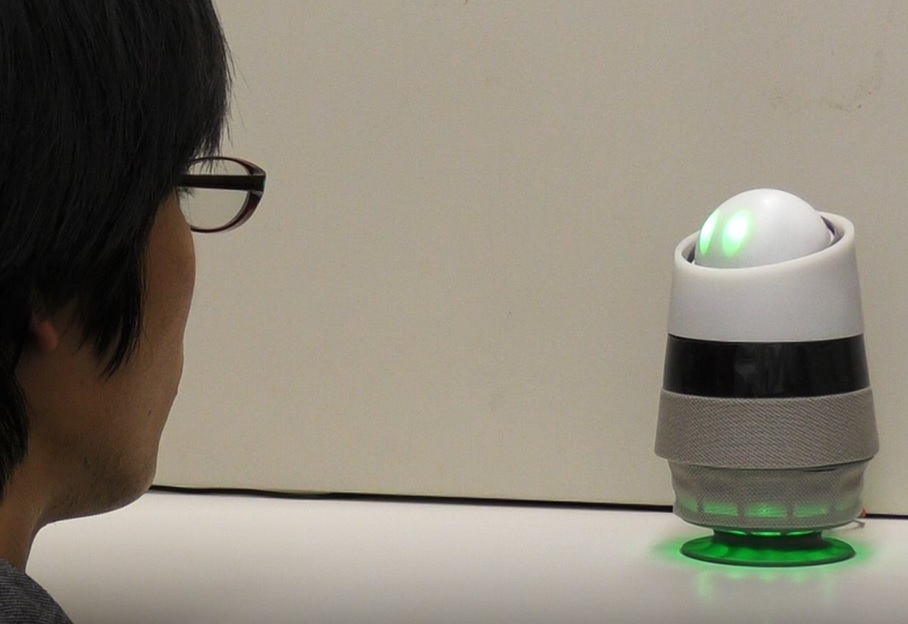
既存のスマートスピーカーでは、インタラクションの開始にウェイクワード(OK Google等)が用いられます。一方で、人間同士のインタラクションにおいては相互注視(アイコンタクト)が会話開始の合図になることが知られています。そこで本研究では、ユーザーの注視を検出した際にシステム側からも注視を返して相互注視を成立させ、それと同時にインタラクションを開始するスマートスピーカーを開発しました。
ヒューマノイド型頭部を付与し注視の伝達を行うテレプレゼンスロボット

通常のビデオ通話やディスプレイ回転型のテレプレゼンスロボットでは、相手の注視方向が正しく伝達されないという課題がありました。これにより、何らかの対象物が存在するインタラクションで重要になる共同注視や、話者交代の合図として用いられる相互注視の達成が困難になるという課題が生じていました。そこで本研究では、遠隔参加者の注視方向をヒューマノイド型頭部を用いて提示するテレプレゼンスロボットを開発しました。
多人数ビデオ会議における話者交代のための視線提示手法
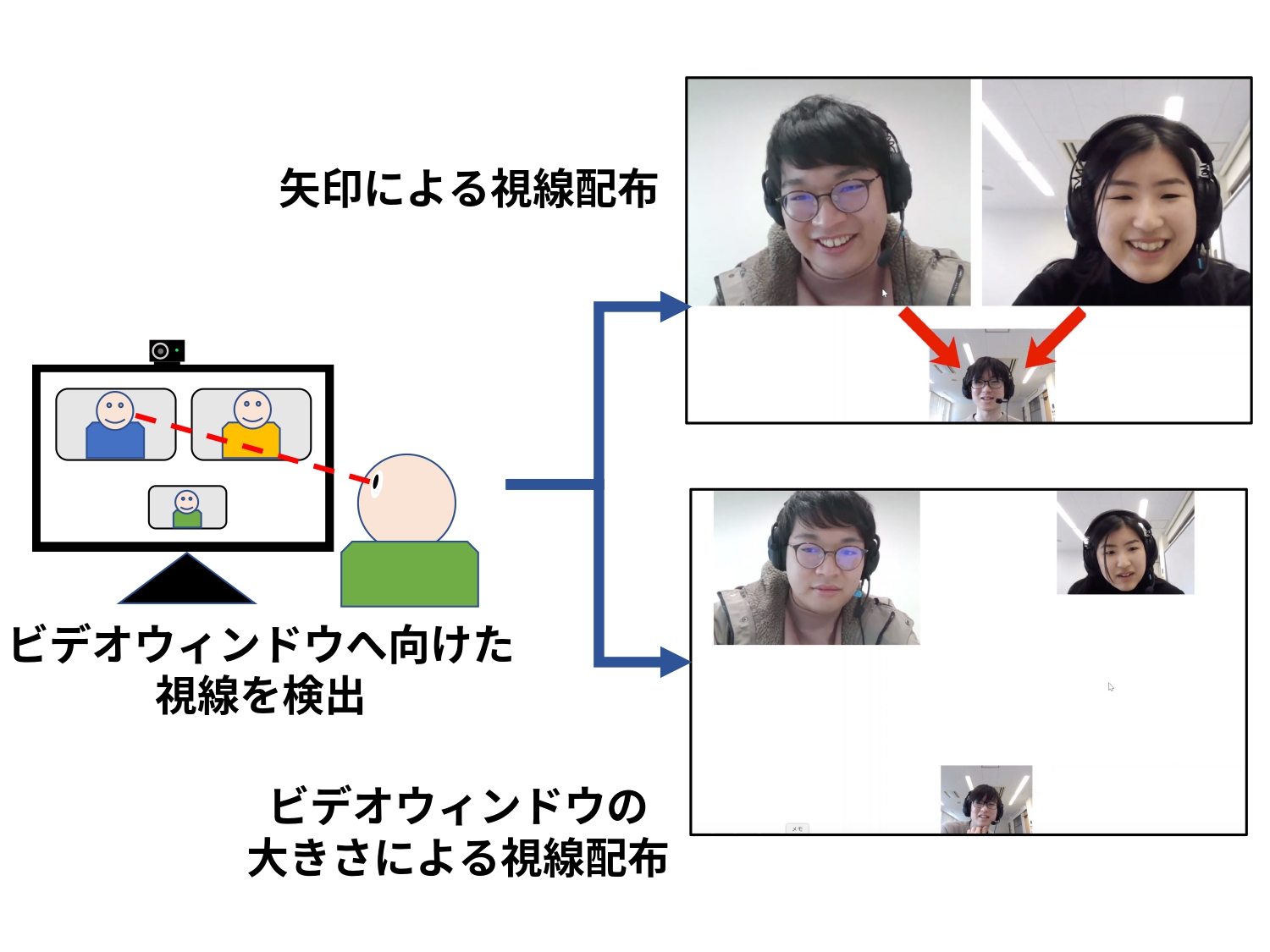
3人以上でビデオ会議を行う際、対面で会議を行う際に比べて会話の話者交替が難しい。これはビデオ会議では「誰が誰を見ているか」が伝わらないためだと考えられる。というのも対面における3人以上の会議において、自分以外の参加者の視線を認識することによって自分の役割(話し手、聞き手等)を理解している。そこで本研究では、多人数ビデオ会議において、会議参加者のビデオウィンドウへ向けられた視線を共有することにより、話者交替を促進するシステムを提案した。
視線情報を用いたアウェアネス支援による遠隔対話の生起支援
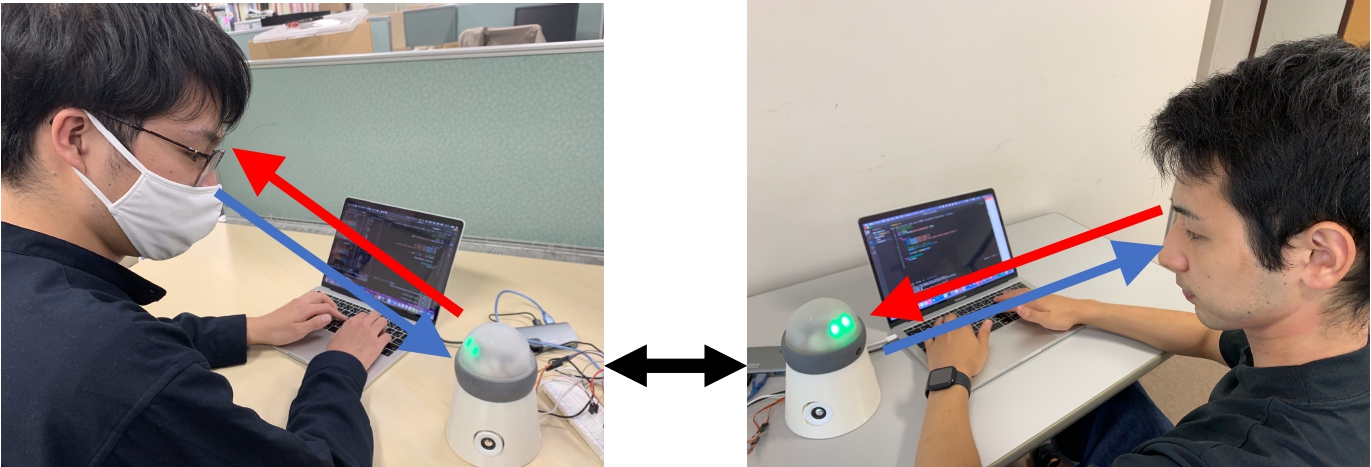
遠隔地間においては対面状況と比較してインフォーマルコミュニケーションは生起されにくいと言われています。その理由として、遠隔地間では相手が対話ができる状態かどうかがわからないことが挙げられます。これに対し対面状況では、アイコンタクトが対話開始の合図になると言われています。そこで本研究では、物理的なアバタを用いることにより、遠隔地間において視線を伝達し合い、アイコンタクトが行われた場合、音声通話を接続するシステムを提案しました。
深度データにより生成したミニチュアを用いたARレイアウト手法

ARにおいて、部屋に仮想オブジェクトを配置する際、操作には時間がかかり、身体的負担も大きい。そこで本研究では、MRデバイスに装着された深度センサを用い、部屋のメッシュを作成し、それを縮小させることにより、部屋のミニチュアを作成する。ユーザがミニチュア内のオブジェクトを移動・拡大縮小することにより、部屋の対応するオブジェクトを移動・拡大縮小できる。これにより、ユーザのオブジェクト配置に対する負担を軽減する。
オンライン会議における会話相手が自分自身を直視しているか否かのみの伝達が参加者に与える影響の調査
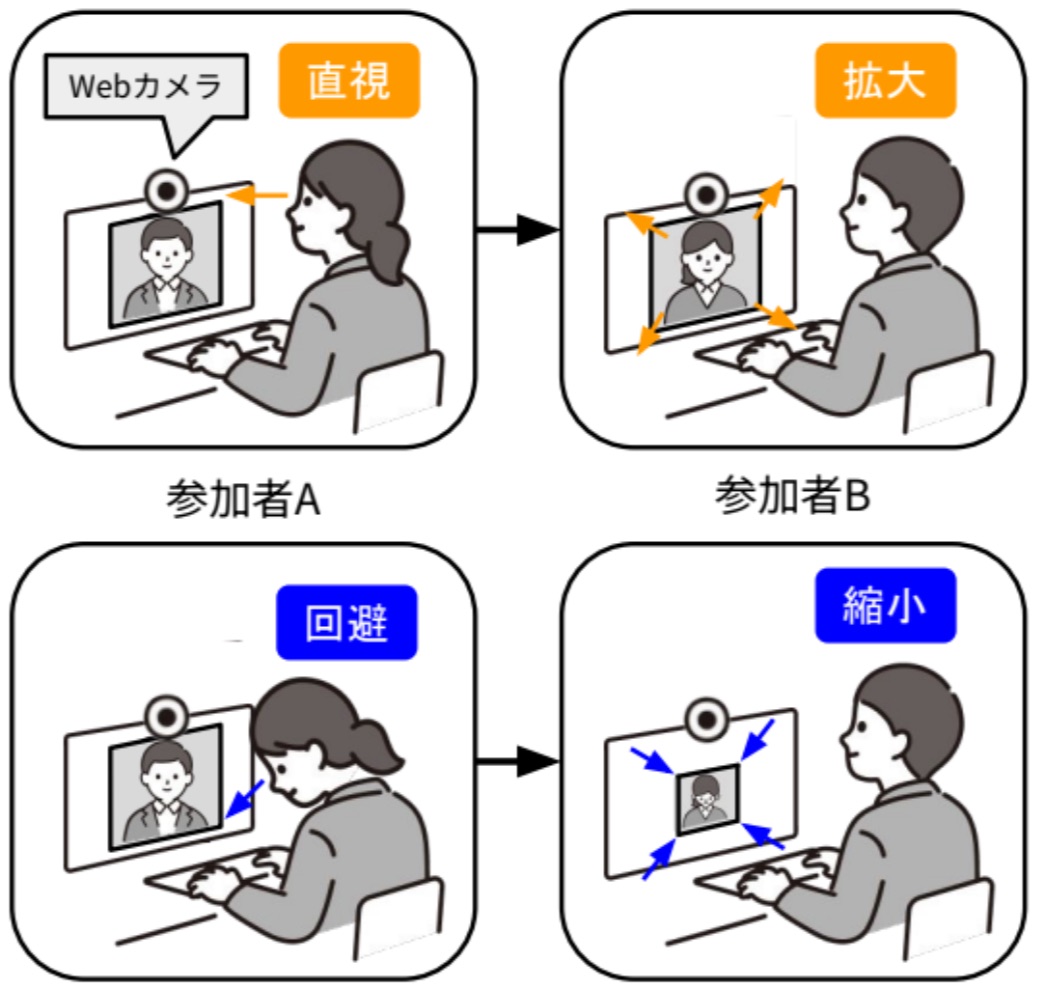
複数人で会話を行う時に重要な役割を果たす視線から得られる非言語情報として、相互注視および視線回避がある。しかし、オンライン会議では、会話相手の映るビデオウィンドウのみから、会話相手の直視および視線回避、すなわち会話相手が自分自身を直視しているか否かを理解することは難しい。そのため、我々はオンライン会議において会話相手が自分自身を直視しているか否かのみをビデオウィンドウの拡大縮小および枠の色の不透明度の変更により伝達する手法を実装・評価した。
単語の肯定度合いを可視化する リアルタイムワードクラウドを用いた議論の促進
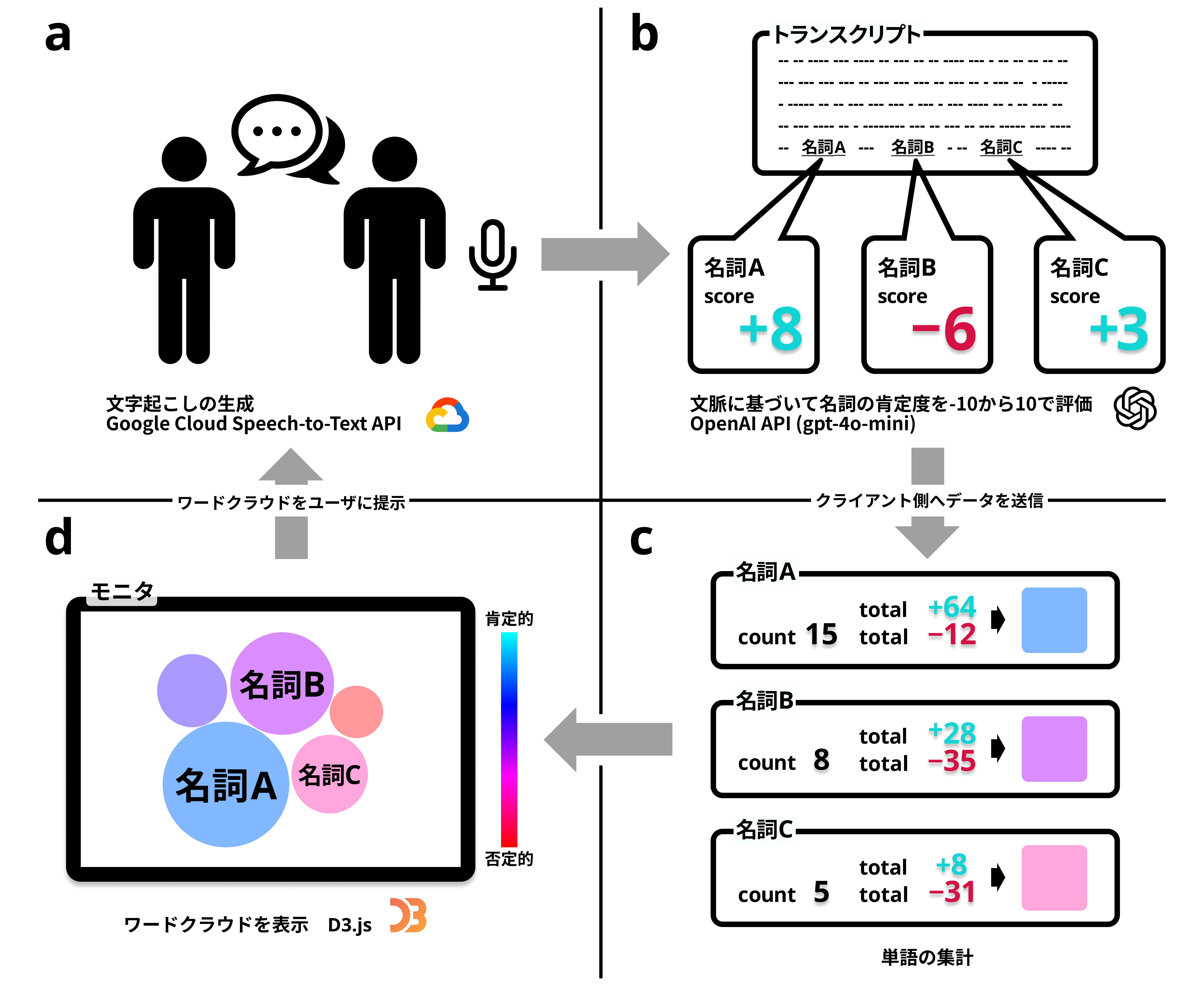
本研究では、議論収束における認識の収束を支援する方法を検討する中で、色の視覚的な効果に注目しました。そして、議論の参加者間における認識の収束を促すことを目指して、リアルタイムに生成されるワードクラウドにおける単語の背景色を、文脈に基づくその単語の肯定度合いをもとに変更するシステムを提案しました。本システムは、議論における音声から名詞を抽出し、肯定度合いを表す色を付与した上でリアルタイムにワードクラウドへ表示します。
視線キューおよび身体配置の可視化によるVR空間での会話の生起支援
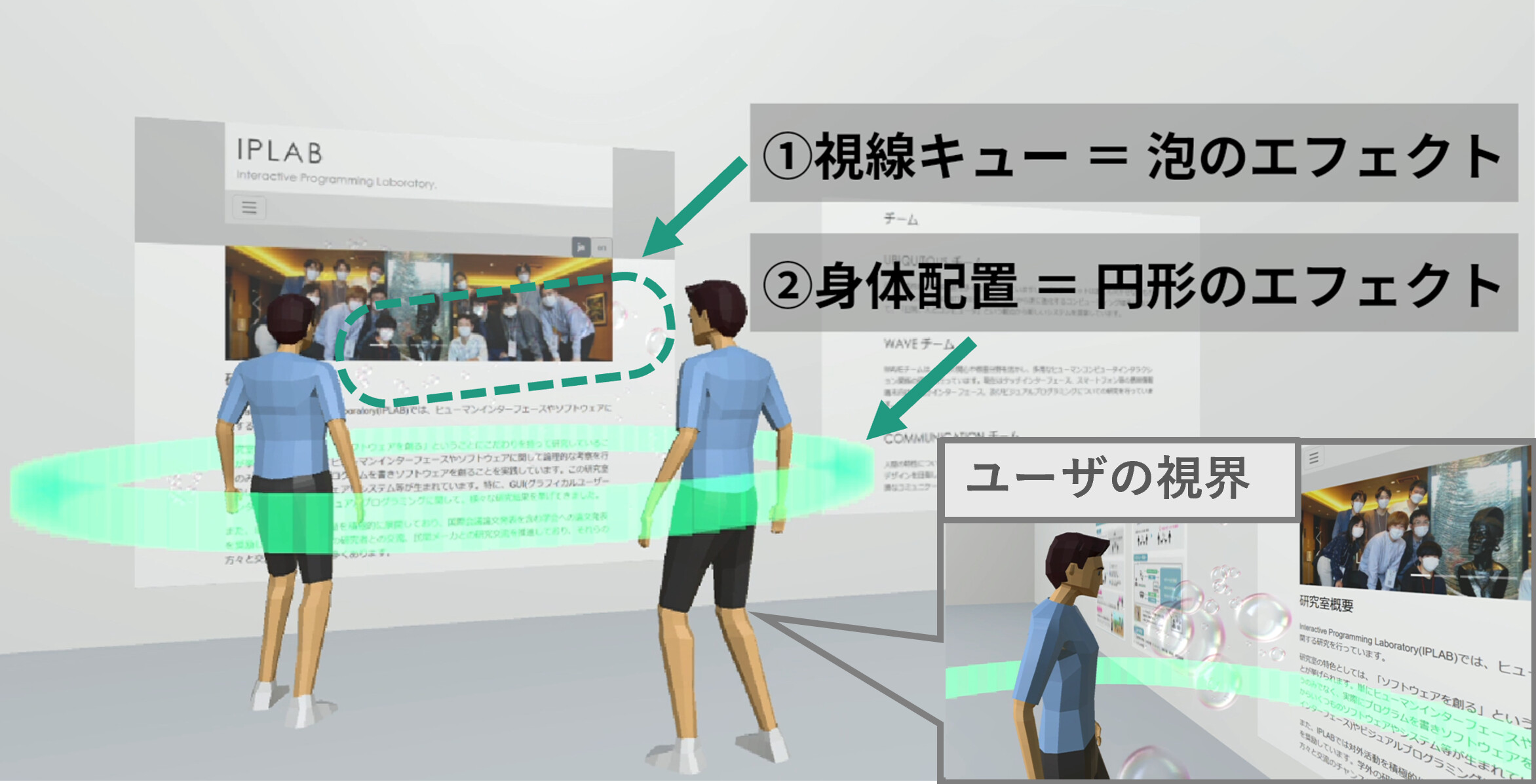
VR空間でのコミュニケーションでは、HMDの視野角制限により他者の非言語情報に気づきにくく、会話の開始に心理的な負担が生じるという課題があります。一方で、対面での対話においては視線や身体の向きが重要な会話開始の合図となります。そこで本研究では、他者の視線や身体の向きをエフェクトとして可視化し、VR空間での自然な会話の開始を支援するシステムを開発しました。
腕部の提示モダリティがビデオ通話における社会的存在感に与える影響の調査

既存のビデオ通話では、指差しなどの非言語情報が伝わりにくく、社会的存在感が低下する課題があります。そこで本研究では、映像のみ、物理的な腕、ARの腕の3条件を比較できるビデオ通話システムを開発しました。実験の結果、物理腕は指差しの判別性や空間共有感を高め、AR腕も注意を妨げにくく一定の存在感を維持できる可能性が示されました。